機器人科學與工程學院在智能機器人研究方面取得重要成果
近期,機器人科學與工程學院聚焦機器人領域的智能導航、自主編程、交互協作的交叉共融開展研究,取得了系列原創性研究成果。
共融機器人代表了智能機器人技術發展的未來趨勢,其所涉及的非結構環境中的多模態感知與情景理解、基于生物信號的行為意圖理解、人機自然交互、機器人個體自主與機器人群體智能,一直是國際智能機器人領域的挑戰性研究課題。
在移動機器人智能導航方面,研究成果“Real-time 3D Single Object Tracking with Transformer”被多媒體領域國際頂級期刊《IEEE Transactions on Multimedia》(中科院一區Top,JCR一區)錄用,將于2022年末正式出版。該成果旨在研究移動機器人在三維點云場景下的目標跟蹤任務。通過探究三維點云數據稀疏特性給目標跟蹤帶來的挑戰,該項研究提出了將孿生網絡以及Transformer結構有機結合的PTT-Net網絡(圖1),有效地解決了遠距離或遮擋情況下點云過于稀疏而導致目標跟蹤效果不佳的問題,對于推動智能機器人環境感知研究發展具有重要價值。
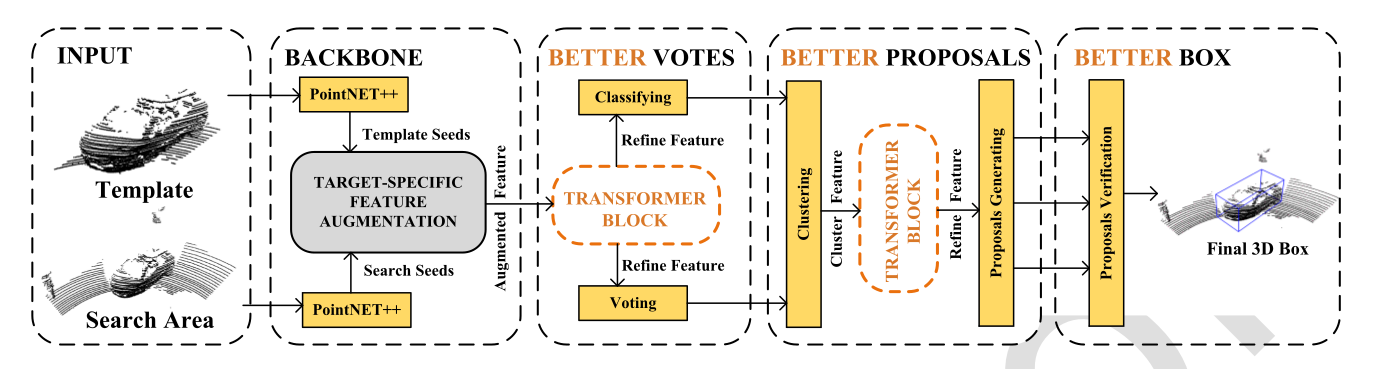
圖1 PTT-NET網絡框架
在機器人自主編程方面,研究成果“Joining Force of Human Muscular Task Planning with Robot Robust and Delicate Manipulation for Programming by Demonstration”在國際機器人領域頂級期刊《IEEE/ASME Transactions on Mechatronics》(中科院一區、JCR一區)上正式發表。該項成果通過研究解決機器人非結構環境下的演示者自然行為辨識、復雜力/位混合裝配過程建模與裝配技巧的自主編程等科學問題,形成了一套完整的機器人柔性裝配理論和技術,實現非結構化環境下的多種類、精密高效的人-機協作裝配(圖2)。此項研究將能夠降低機器人使用門檻,拓展工業機器人在電子制造領域應用,提高產品的生產效率與產品質量。具有十分重要的理論研究價值和潛在的市場應用價值。
圖2 基于骨骼肌肉系統演示的機器人自主編程
在多機器人交互協作方面,研究成果“Dissipativity-Based Consensus Tracking Control of Nonlinear Multiagent Systems With Generally Uncertain Markovian Switching Topologies and Event-Triggered Strategy”在控制論領域頂級期刊《IEEE Transactions on Cybernetics》上發表,將于2022年11月正式出版。該研究針對具有外部擾動的時變時滯非線性多智能體系統,考慮了具有不確定性和部分未知元素的廣義不確定馬爾科夫跳變切換拓撲結構,建立了模態依賴的分布式協議和事件觸發機制,從而減少不必的通信負擔,提出了一種模態和時滯項依賴的增廣多重積分能量函數分析方法,解決了干擾情況下的非線性多智能體系統的領導者和跟隨者耗散一致性跟蹤控制問題,為實際場景下的多機器人交互協作提供了理論基礎(圖3)。
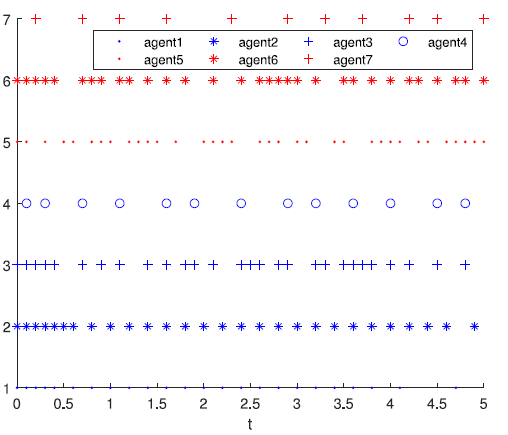
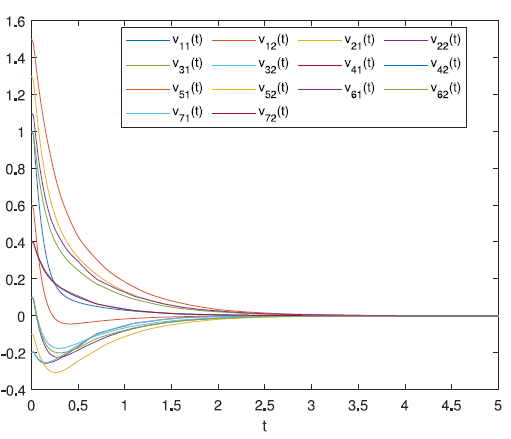
圖3跟隨者的事件觸發時刻以及領導者和跟隨者的狀態誤差
上述研究成果得到了國家重點研發計劃專項“工業機器人伺服系統產品性能優化及工程化應用”、國家自然科學基金重點項目“面向智能工廠的人機協作型機器人協同機理與控制技術研究”的資助,獲得了遼寧省機器人智能感知與交互技術工程研究中心與沈陽市智能機器人重點實驗室的支持,相關成果分別由機器人學院專任教師方正、王斐和王軍義等完成。基于上述成果,機器人學院已攜手未來技術學院,以習近平總書記強調的“四個面向”為指導思想,以解決機器人領域世界科學難題和服務國家重大戰略需求為目標,持續在國家經濟主戰場和人民生命健康領域發揮“機器人+”的作用,積極開展智能機器人領域的交叉研究并探索該領域科技創新領軍人才培養的新范式。
