多水下機器人協同控制研究取得重要進展并順利完成海試
近日,由我院徐紅麗教授負責的多水下機器人協同控制技術研究取得重要進展,配合鵬城國家實驗室重點項目“多水下敏捷機器人協同作業平臺”順利完成第一階段海上試驗驗證,在國內率先實現了由“1艘母船+2艘無人艇+4臺自主水下機器人”組成的異構多水下機器人系統的協同編隊。
徐紅麗教授帶領的水下機器人研究團隊首先面向異構、跨域多水面、水下機器人平臺提出了一種通用分布式多水下機器人協同控制體系結構,包括一套通用的混合鏈路通信接口協議、一種跨平臺通用的協同控制器和面向水下弱通信的分層分布式協同控制體系框架。其次,為了克服實際環境中水聲通信的延遲和不確定性,提出了基于元啟發智能的異構多水下機器人編隊控制技術。局部水聲通信網絡下,水下機器人從無人艇的廣播信息中獲取全局信息,并作為啟發式信息融入隊形控制算法中,實現無人水面艇和水下機器人的協同一致運動。
應用所提出的理論方法完成了15套通用協同控制器的開發,其中7套集成于鵬城實驗室采購的無人艇和自主水下機器人平臺上。自2020年9月以來,配合項目總體先后完成了雅寶水庫聯合調試、松山湖湖上試驗、大亞灣海上試驗等一系列測試和驗證,初步驗證了通用協同控制器的可行性。從試驗數據看在各廠家自主水下機器人平臺航行性能不一致的條件下,協同控制器可保持隊形控制誤差穩定在5%以內。
未來,水下機器人研究團隊將繼續深入研究水下弱通信、弱觀測環境對協同控制一致性的影響機理,進一步優化通用協同控制解決方案,并與鵬城國家實驗室等國內一流團隊緊密合作,推動我國多水下機器人系統研究與應用的進步。
所研制的通用協同控制器(集成于每個協同平臺上)
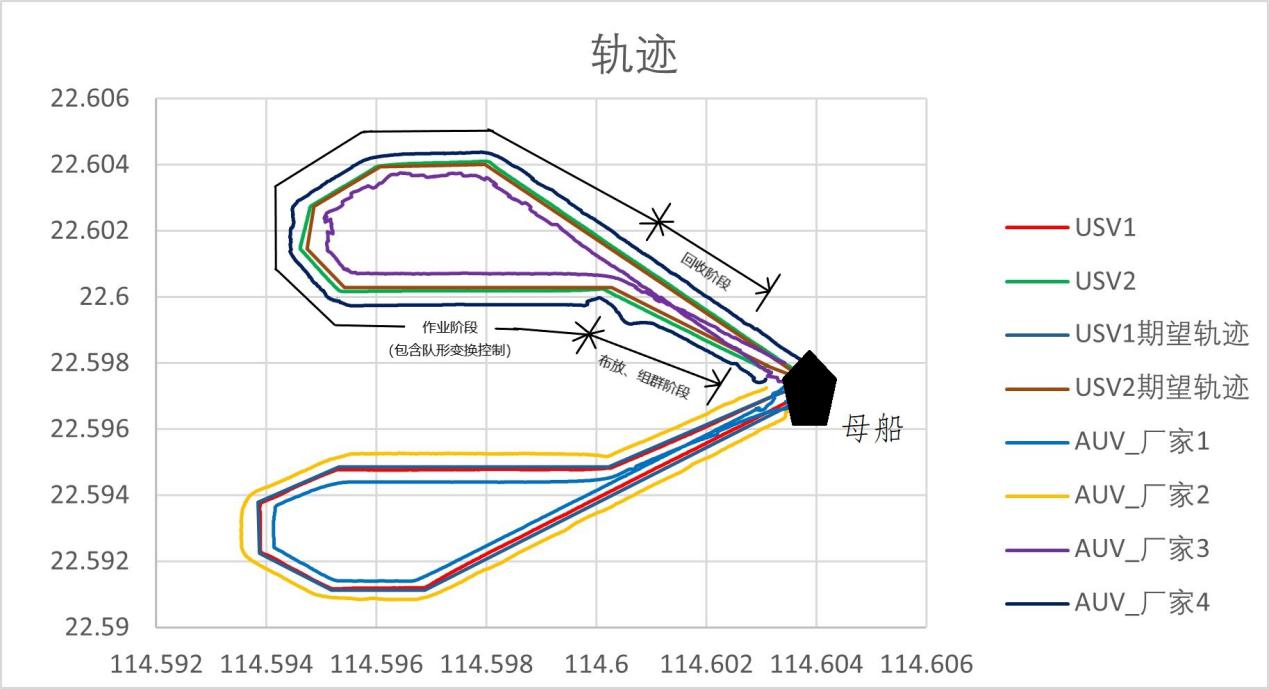
“1+2+4”協同編隊試驗結果——航行軌跡
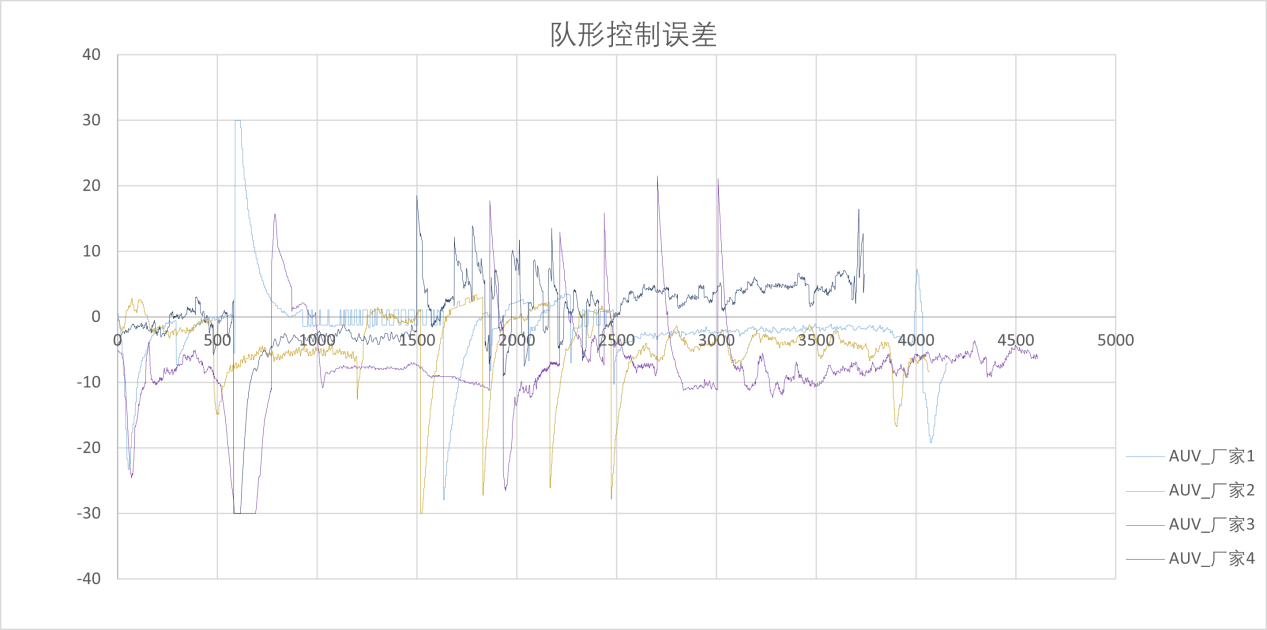
“1+2+4”協同編隊試驗結果——隊形控制誤差

全體項目組人員合影
